Attended the SAGEEP 2014 meeting in Boston, March 16-20, (http://www.eegs.org/Annual-Meeting-SAGEEP/SAGEEP-2014), where I presented a talk on work at the Shale Hills CZO.
Dynamic time warping of time-lapse GPR data to monitor infiltration at the Shale Hills Critical Zone Observatory in a session on advances in GPR.
Jonathan Nyquist, Temple University, nyq@temple.edu(Presenter)
Laura Toran, Temple University, ltoran@temple.edu
Henry Lin, Penn State University, hul3@psu.edu
Lacey Pitman, Temple University, tue87398@temple.edu
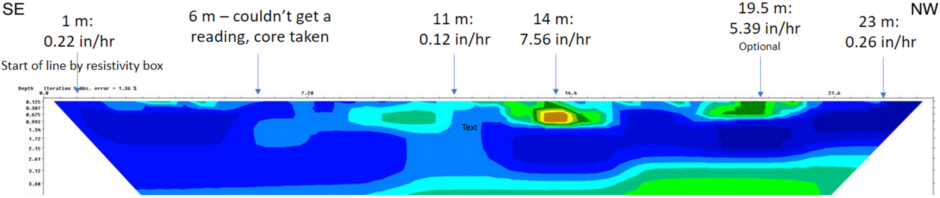
We released water and brilliant blue dye (4 g/L) into a 1-m long trench cut into the hillside at the Shale Hills CZO and monitored downslope migration of the solution through the unsaturated zone using time-lapse ground penetrating radar (GPR). The site was then excavated to photograph the dye pathways. The goals were to improve our understanding of how GPR can be used to interpret infiltration by comparing radargrams and photographed dye pathways and to evaluate the importance of the soil-bedrock interface and saprolite fabric on infiltration pathways. Time-lapse GPR data can enhance the signal, but processing is challenging. Directly differencing radargrams produces spurious anomalies because the addition of water not only changes the reflection coefficients but also alters the subsurface radar velocity, misaligning reflectors of the before and after time sections. Constant-offset GPR provides insufficient velocity information for migration to realign the peaks. We investigated an alternate approach called Dynamic Time Warping (DTW), originally developed for speech recognition. DTW nonlinearly stretches and contracts the time scale to find an optimal match between waveforms. Once aligned, the radargrams can be differenced to find changes in reflection strength. GPR radargrams showed a fingering pattern similar to the dye trace photographs, but with less obvious resolution of the structural fabric. The depth of penetration of the dye (approximately 0.5 m) and lateral migration (about 0.2 m) were also captured by the radargrams. Although the depth of penetration was controlled by bedrock, the fingering observed in the dye did not seem to be influenced by undulations in the bedrock but was set by the fabric encountered in the saprolite. GPR provided a rapid method for mapping bedrock, which was an important control on depth of infiltration. GPR also suggested fingering occurs, but detailed pathways were difficult to resolve without dye tracing and excavation.
and was a coauthor on a paper in the section on Infrastructure
|
|
|
Application of Electrical Resistivity Imaging to Evaluate the Geometry of Unknown Bridge Foundations Joseph Coe, Temple University, joseph.coe@temple.edu(Presenter) |
|
Electrical Resistivity Imaging (ERI) was utilized to image the subsurface at two bridge sites owned by the Pennsylvania Department of Transportation. Data were acquired using 28 electrodes and an Advanced Geosciences (AGI) SuperSting R8 resistivity meter, which allowed multiple array configurations (e.g., Dipole-Dipole, Schlumberger, and Wenner). Site conditions, hardware configuration, and testing procedures are presented, followed by a discussion of data analysis and interpretation. The purpose of the ERI testing was to determine the bridge foundation geometry, including configuration, depth to bottom, and dimensions, at two bridges where design information was available to determine the feasibility of using this method for bridges with unknown foundations. Typical surface methods for evaluating unknown foundations are often unable to recover information from below a pile cap. ERI presents an opportunity to address this limitation and provide geometry information without the need for drilling operations. The ERI results were promising at one of the sites and provided a reasonable estimate of pile cap dimensions (8.5 m x 7.0 m) compared to actual dimensions (7.3 m x 5.5 m). ERI also detected the presence of battered piles at an approximate 1:2.5 batter angle, which compared favorably with the 1:5 batter angle shown on the foundation plans. Interpretation of the ERI images at the second site proved problematic. This was likely due to issues with data inversion when creating the resistivity section since the resistivity values of the soils were extremely low throughout the site. Moreover, foundation bottom predictions were negatively impacted at both sites by poor signal to noise ratio likely resulting from high levels of background electrical noise from nearby utilities and fences. Despite these issues, ERI shows potential as a tool for evaluating unknown bridge foundations, particularly in less urban areas where noise levels could be more manageable. |