The complex electrochemical behavior of batteries results in nonlinear and high-dimensional dynamics. Accurate SOC prediction is paramount for increased performance, improved operational safety, and extended longevity of LiBs. The battery’s internal parameters are cell-dependent and change with operating conditions and battery health variations. We present a data-driven solution to discover governing equations pertaining to SOC dynamics from battery operando measurements.
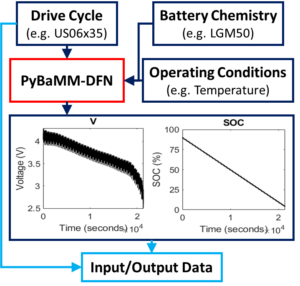
Schematic of Data Collection Process
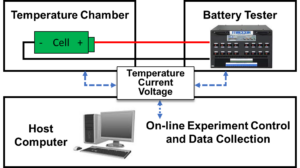
Schematic of Experimental Setup
Our approach relaxes the need for detailed knowledge of the battery’s composition while maintaining prediction fidelity. The predictor consists of a library of candidate terms and a set of coefficients found via a sparsity-promoting algorithm. The library was enhanced with explicit physics-inspired terms to improve the predictor’s interpretability and generalizability. Further, we developed a Monte Carlo search of additional nonlinear terms to efficiently explore the high-dimensional search space and improve the characterization of highly nonlinear behaviors. Also, we developed a hyperparameter autotuning approach for identifying optimal coefficients that balance accuracy and complexity.
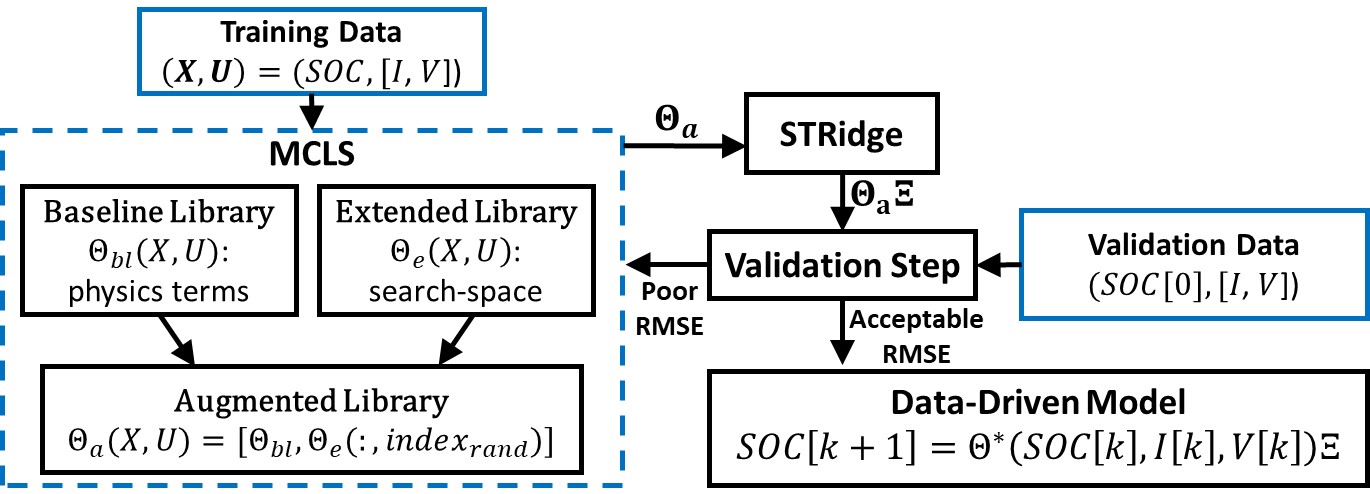
Schematic of Monte Carlo Library Search (MCLS)
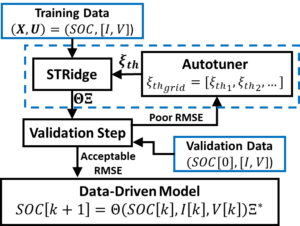
Schematic of Hyperparameter Autotuner
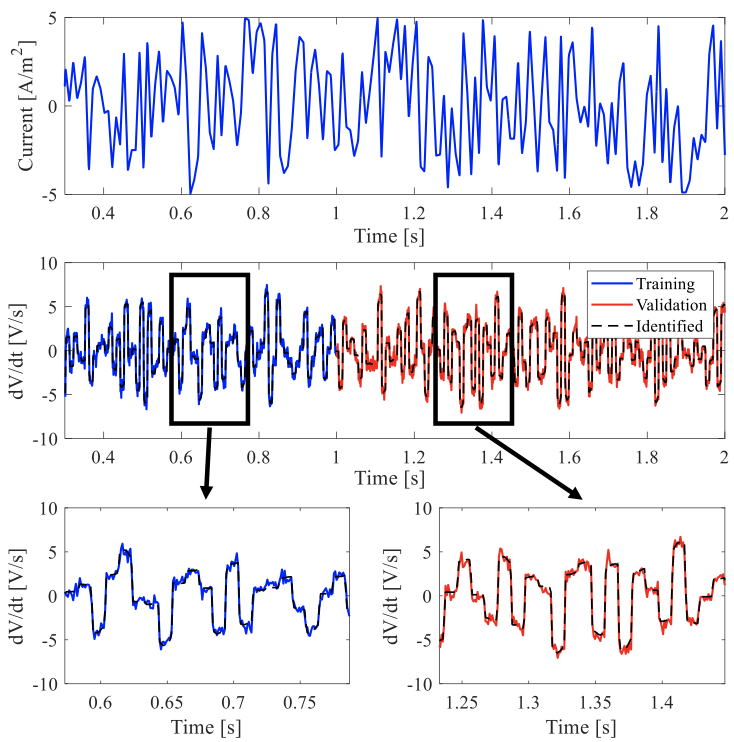
We tuned the model’s performance and sparsity by exploring different combinations of candidate terms (basis functions) and data sampling rates. The resulting SOC predictor achieved high predictive performance scores (RMSE) of 2.2e-6 and 4.8e-4, respectively, for training and validation on experimental results corresponding to a stochastic drive cycle.
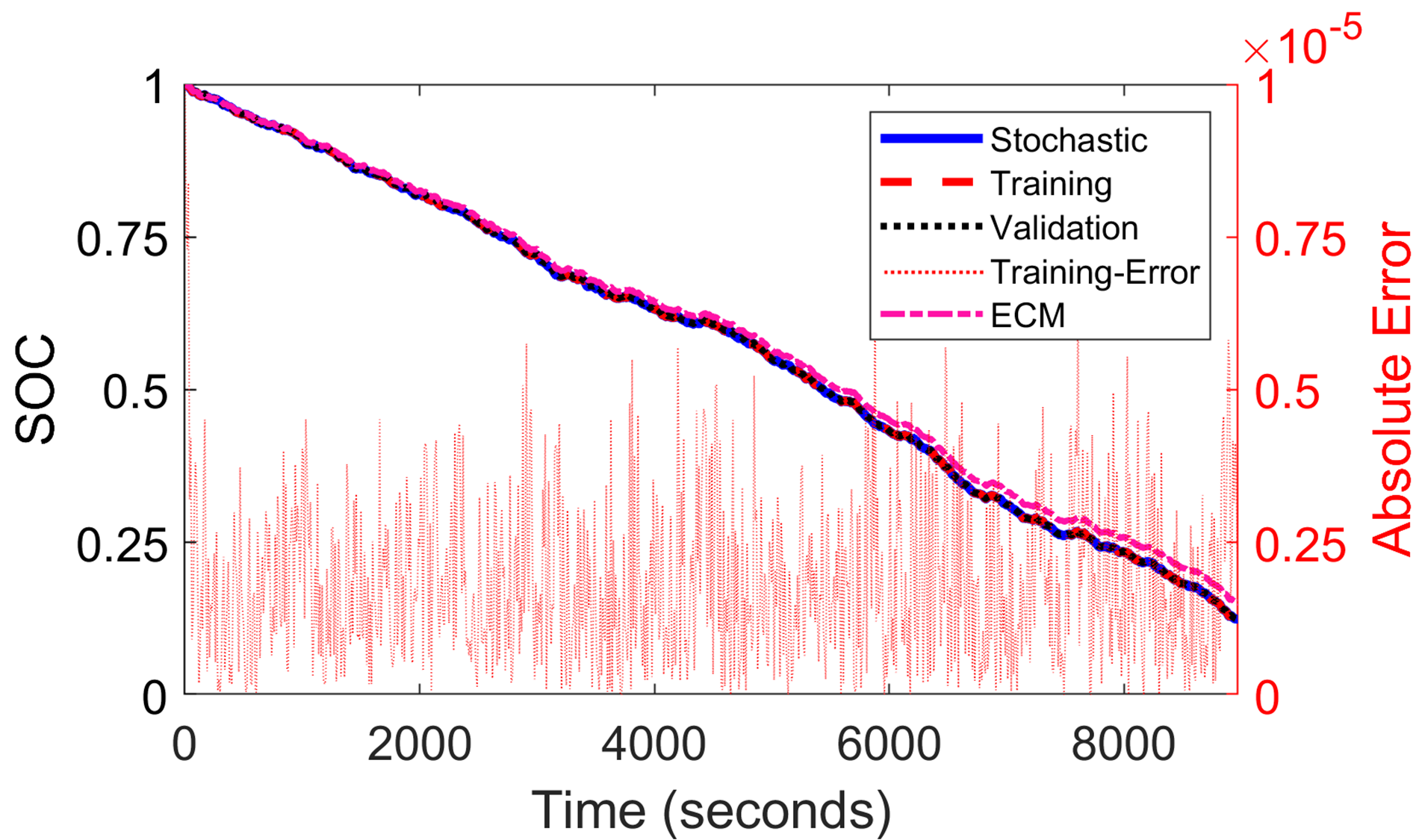
Training Results and Model-Validation to predict SOC from current, voltage, and initial SOC (Experimental Data)
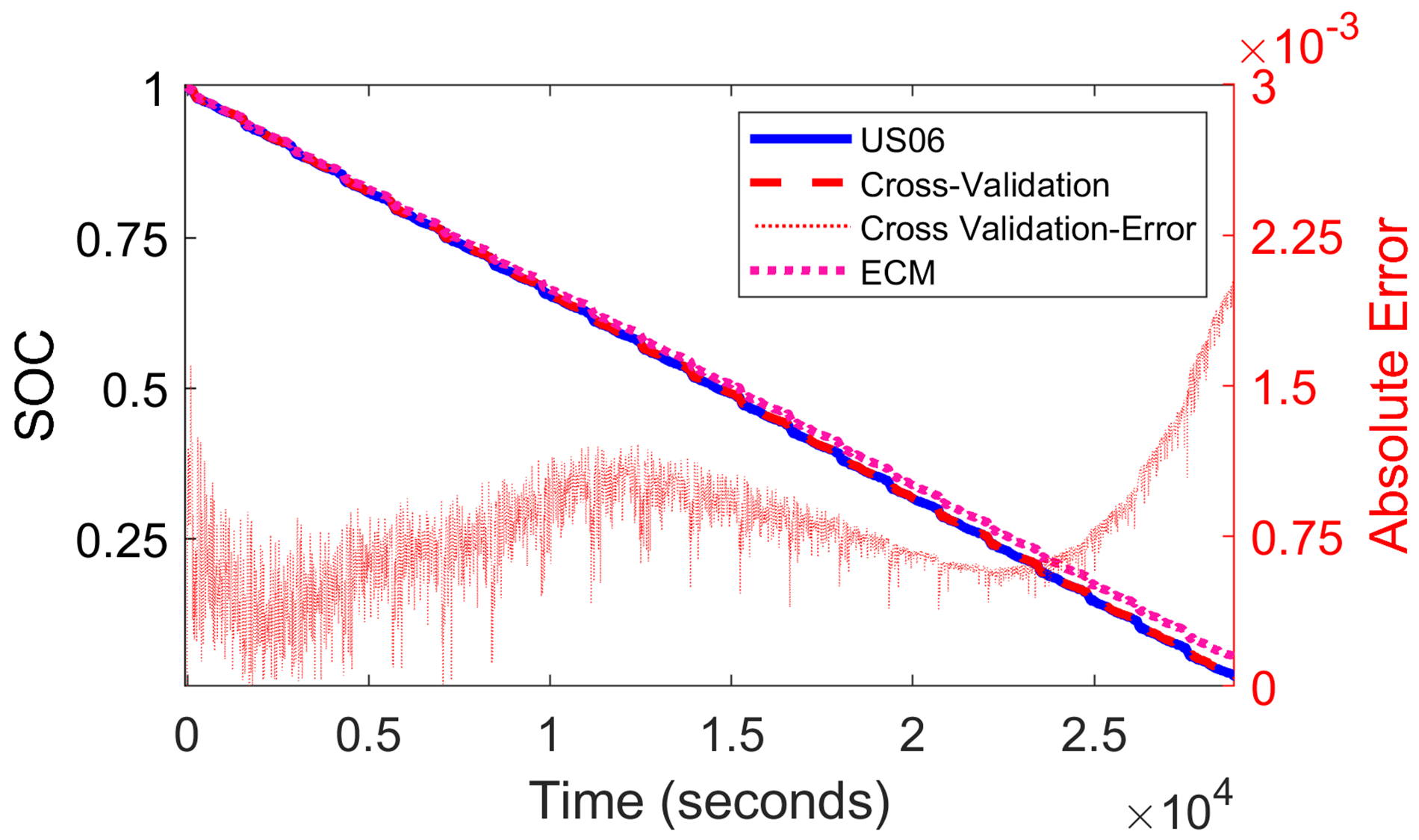
The predictor achieved a generalizability RMSE of 8.5e-4 on unseen battery measurements corresponding to the standard US06 drive cycle, further showcasing the adaptability of the predictor and the enhanced modeling approach to new conditions.
The modeling technique includes explicit physics-inspired terms, which allows for interpretable and generalizable models. Furthermore, the procedures and methods developed in this research are generic and can guide machine learning modeling of other dynamical systems.
Publications
- Rodriguez, R.., Ahmadzadeh, O., Wang, Y., & Soudbakhsh, D. (2023). Data-driven Discovery of Lithium-Ion Battery State of Charge Dynamics. Journal of Dynamic Systems, Measurement, and Control, 1-13, https://doi.org/10.1115/1.4064026.
- Rodriguez, R., Ahmadzadeh, O., Wang, Y., & Soudbakhsh, D. (2023, May). Discovering governing equations of li-ion batteries pertaining state of charge using input-output data. In 2023 American Control Conference (ACC) (pp. 3081-3086), IEEE, https://doi.org/10.23919/ACC55779.2023.10156114.
- Ahmadzadeh, O., Rodriguez, R., Wang, Y., & Soudbakhsh, D. (2023, May). A physics-inspired machine learning nonlinear model of li-ion batteries. In 2023 American Control Conference (ACC) (pp. 3087-3092). IEEE, https://doi.org/10.23919/ACC55779.2023.10156368.
- Ahmadzadeh, O., Rodriguez, R., and Soudbakhsh, D. “Modelling of Li-ion Batteries for Real-Time Analysis: A Data-Driven Approach”, American Control Conference, 2022, https://doi.org/10.23919/ACC53348.2022.9867616