
User Driven Treadmill:
Many studies have shown the benefits of treadmill rehabilitation in impaired subjects. However, a traditional fixed speed treadmill may present a hazard, especially for an impaired subject. For this reason, we are developing a self paced treadmill that adapts to the user’s walking speed. To accomplish this task, we use the information received from a motion capture system and an instrumented treadmill. The walking speed is estimated in real time and the treadmill commanded to tightly follow such speed.

Symmetric and Assymetric Gait on a Self-Paced Treadmill with No Vision
Researchers (Santiago Canete)
Pneumatic System for Exoskeleton Research:
Wearable robotic exoskeletons can improve many gait impairments including asymmetry due to stroke, limited range of motion due to incomplete spinal cord injury, and decreased walking speed due to advanced age. Pneumatic artificial muscles are a type of lightweight actuator to provide assistive exoskeleton forces to help a subject walk. We are developing a pneumatic system to power and control our exoskeletons which will support the other ongoing research projects.
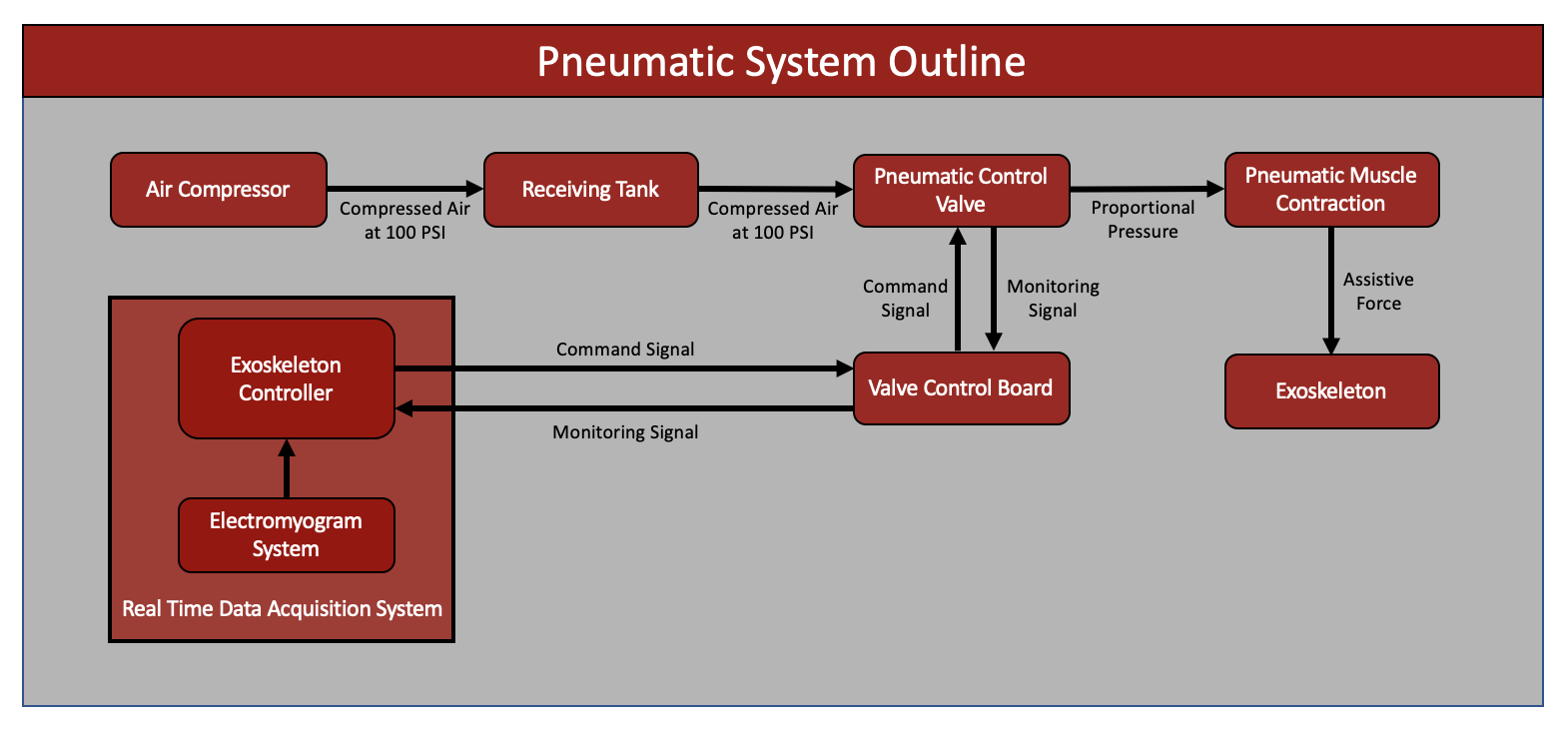
For more information about the project, contact Ben Cozzolino benjamin.cozzolino@temple.edu
Musculoskeletal Modeling for Victims of Mobility Impairments:
In the United States, one in every eight adults suffers from a gait impairment that restricts their mobility. Proper diagnosis and treatment of these impairments requires an accurate understanding of an individual’s motion – kinematics – and the muscle forces that produce their motion – dynamics. Musculoskeletal modeling is an essential technique for non-invasively acquiring these kinematic and dynamic estimates. Yet, because musculoskeletal models have primarily been developed in the context of unimpaired individuals, our understanding of the kinematics and dynamics of individuals with gait impairments like stroke, osteoarthritis, multiple sclerosis, and cerebral palsy is limited. We are analyzing the effect of adding degrees of freedom to the joints connecting the lower limb joints in musculoskeletal models in order to reduce the uncertainty that is introduced when soft-tissues motion is neglected and advance our biomechanical understanding of impaired gait patterns.
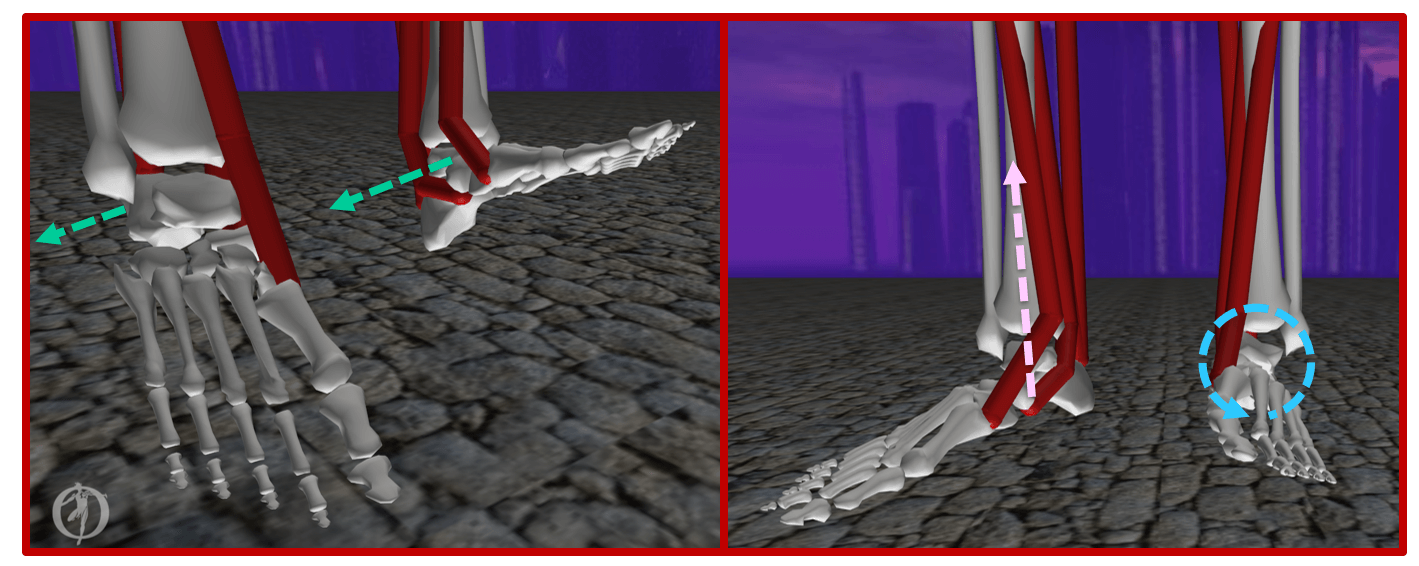
For more information about the project, contact Owen Pearl owen.pearl@temple.edu