Modeling of Li-ion Batteries for real-time analysis and control: A Data-Driven Approach
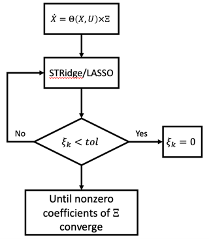
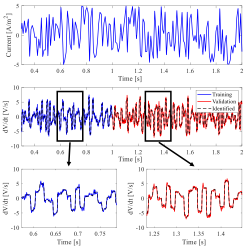
We are working towards data-driven modeling (DDM) of Li-ion batteries (LIBs). Lithium-ion batteries are present in many modern world applications due to several desirable properties like high energy and power density. Accurate real-time modeling of the LiBs improves their operation and safety. However, developing physics-based models is a very cumbersome, time-consuming task and requires several measurements and information that often are not available. The new DDM techniques offer a solution for control-oriented modeling of energy storage devices. We developed a sparse model of batteries using a technique called sparse identification of nonlinear dynamics. We explored a set of potential terms known as library to develop the model. The sparse model was achieved by formulating the problem as a ridge regression optimization and finding the dominant terms. Model performance and robustness were assessed via validation and generalization tests. Additionally, the model was tested for its robustness to noise. We showed the trend of the model parameters with the charge/discharge curves. Next, we improved the model by including information about the state of charge (SOC) in the library. The model with SOC as a parameter does not need the interpolation of the parameters as the battery goes through charge/discharge. We showed the performance of this model using the US06 highway driving cycle. Read more
Publication:
“Modeling of Li-ion Batteries for real-time analysis and control: A Data-Driven Approach”, ACC2022
Omidreza Ahmadzadeh, Renato Jesus Rodriguez Nunez, Damoon Soudbaksh
Adaptive Control of Network Control Systems
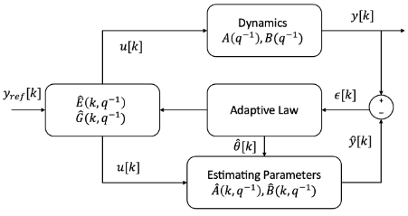
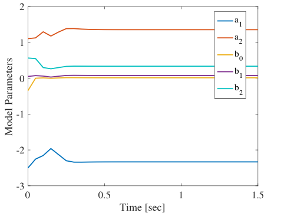
We present a matrix form for adaptive control with network control systems. We address the problem of controlling systems with linear dynamics with unknown parameters over a network. The dynamical system can be unstable subject to network delays. The delays are introduced due to the presence of several control and non-control applications in the network control system. We show the effectiveness of the algorithm through a simulation study on a Control Area Network (CAN bus).
Publication:
“Adaptive Control of Network Control Systems”, ECC2021
Omidreza Ahmadzadeh, Damoon Soudbaksh
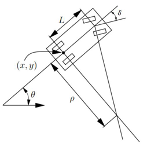
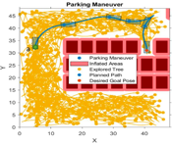
Motion Planning for Car Parking using RRT* Algorithm
Motion planning is a critical aspect of self-driving vehicles. This is typically done using sampling-based methods. Here, we investigated a popular motion planning algorithm called Rapidly Exploring Random Trees (RRT*) in low-speed scenarios. Specifically, we studied the problem of navigating self-driving cars from an initial point to a destination in a crowded environment. Other objects in the environment can be other cars, pedestrians, or fixed structures. The algorithm was able to find a path with stationary objects. The next step involves developing an algorithm for more complex and efficient cooperative motion planning in crowded environments.
Engineer’s Week Graduate Student Research Poster Presentation 2020
Omidreza Ahmadzadeh, Damoon Soudbakhsh