Currently, at CSNAP three projects are underway.
The first project that CSNAP is involved in is Dynamic Interrogation using Bimodal Sensing for Tumor Characterization. Most existing medical imaging devices are static, meaning the source and detector positions are fixed. By tightly integrating hardware and software, dynamic sensing and control of the source and detector positions can be achieved, leading to superior imaging performance. Developing such a high-performance system—in terms of accuracy, autonomy, and reliability—requires dynamic coordination between sensors and actuators.
We propose to develop optical sensing and dynamic optimal control methods for inclusion characterization. As a practical application, we will design a robotic system for tumor characterization. This system will non-invasively and safely distinguish between malignant and benign tumors by dynamically adjusting the sensor geometry.
The objectives of this project are to:
- Develop a dynamic interrogation system,
- Coordinate the sensor/actuator geometry using Stackelberg Statistical Game Control, and
- Integrate and experimentally validate the dynamic interrogation system.
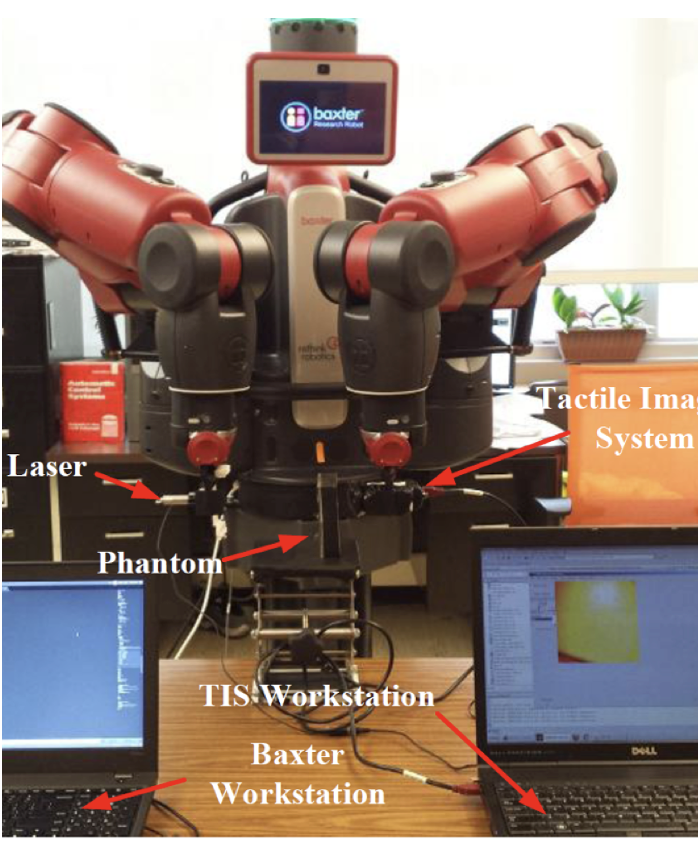
The second project is the Tactile Sensors and Imaging Probe for biomedical applications. Often doctors and surgeons rely on their touch sensation to diagnose or identify the diseased regions, however, palpation is highly dependent upon the skills of the practitioner. A detailed study of palpation would improve the current medical procedures and new doctor training. The development of a reliable tactile sensing system would immensely benefit the medical community, but the development of a sensing system that quantifies and displays the tactile sensation has been inadequately addressed. Perhaps this is due to the complex nature of how the tactile sensation process. Tactile sensation is a complex process that needs to be addressed as a system. In this project, we propose to design, build and test a sensor that will be able to image the tactile sensation of an object. From this image, we obtain the mechanical properties such as the elasticity of the contacting as well as embedded objects. The developed sensory imaging system will efficiently measure, record, and recreate tactile information. We have also used a novel machine learning techniques to classify tumor as malignant and benign. The potential application of the device is in screening for the possible lumps in the breast, thyroid, and skin. Currently, we are working on a project to implement this sensor on a smartphone platform. The main application is breast tumor characterization.


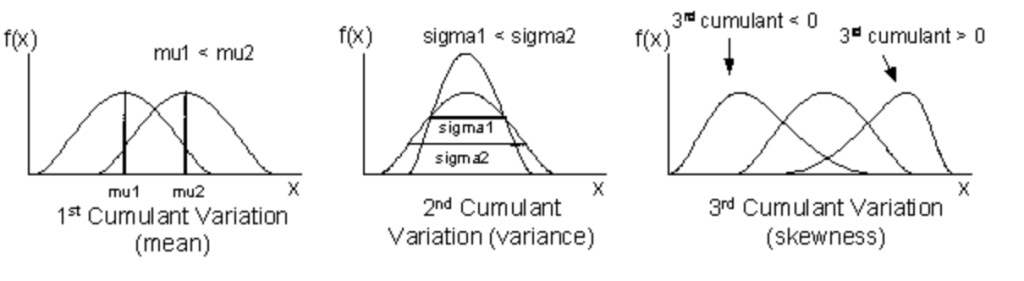
The third project is the statistical control theory project. Here, we are developing statistical control theory. In statistical control, we view the cost function as a random variable and optimize the distribution of the cost function. This generalizes the classical linear quadratic Gaussian control. My collaborators and I have already developed the linear version of statistical control theory; and currently, we are working on the nonlinear version. In this work, I investigate the characteristics of linear statistical control theory, develop nonlinear statistical control, and study the relations between statistical control and dynamic game theory. This work will be a starting point for the nonlinear statistical control theory development. My long-term goal is to completely develop linear, nonlinear, full state feedback, output feedback, finite time horizon, infinite time horizon statistical control theory and apply it to various aerospace applications. This project was supported by Army Research Office and NSF.
Past research activities include remote sensing imager development and open circuits laboratory.
AT ETRI, Dr. Won was involved in developing a control system for a remote sensing satellite. The director developed satellite attitude control systems. Also, the CSNAP director was involved in two National Aeronautics and Space Administration (NASA) projects with UMAC at the University of North Dakota; Agricultural Camera (AgCam) and Airborne Environmental Research Observational Camera (AEROCam). The objectives of both these projects are to provide farmers and ranchers with reliable remote sensing data for precision land management.



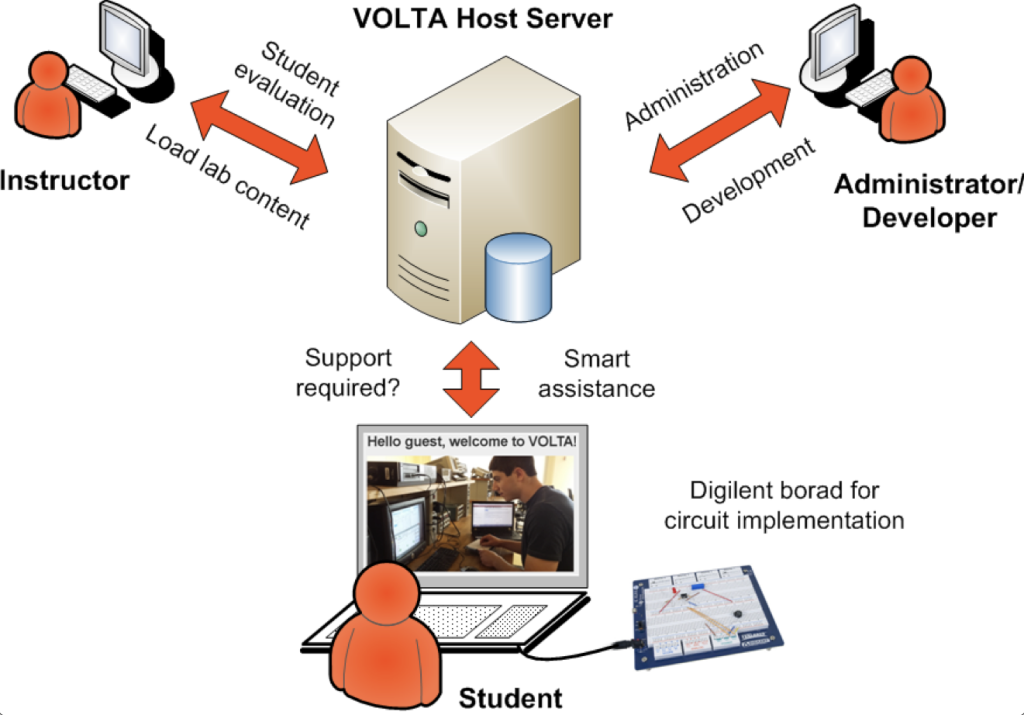
The other project is focused on developing an open laboratory. Open laboratory allows students to access the engineering labs 24/7. The Virtual Open Laboratory Teaching Assist (VOLTA) is a software tool currently under development by Temple University’s Control, Sensor, Network, and Perception (CSNAP) laboratory to support open laboratory. The VOLTA project aims to create an interactive and intelligent framework for laboratory coursework. VOLTA is a new way to present laboratory work to students and features an intelligent help module and a circuit recognition module. For more information, see VOLTA project. This project is sponsored by the NSF.
A platoon of small satellites flying in a formation for research and commercial purposes is a realizable dream. In order to effectively use a platoon of small satellites, however, we need accurate, low-cost, autonomous, and small navigation sensors. Thus, in this project, we developed an autonomously aligning micro-navigation sensor network for the formation flying small satellites. Researchers at CSNAP developed a novel laser alignment technique for the autonomous attitude alignment, a new nonlinear optimal control theory for sensor attitude control, a multi-sensor integration method for accurate attitude determination, a micro-navigation sensor network for a platoon of small satellites, and a testbed for verification of the new theories and algorithms. This was an NSF project.
