
Jazzy Jalisco
Instructions are found from ROS2 documentation website here.
Below are screenshots for the from the website with the code underneath to copy.
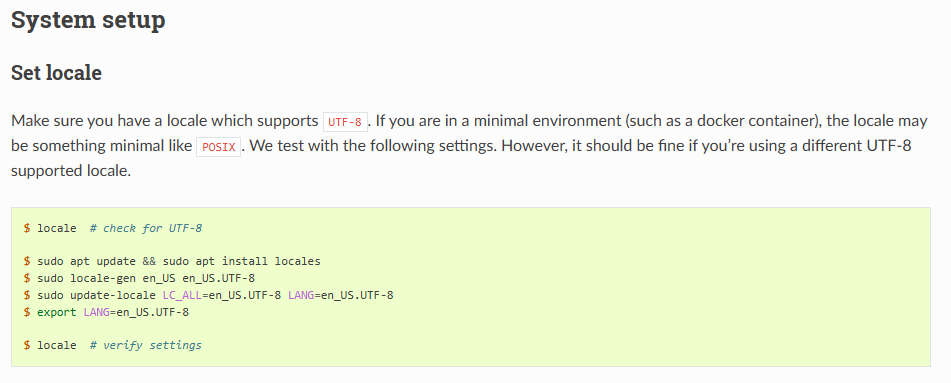
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
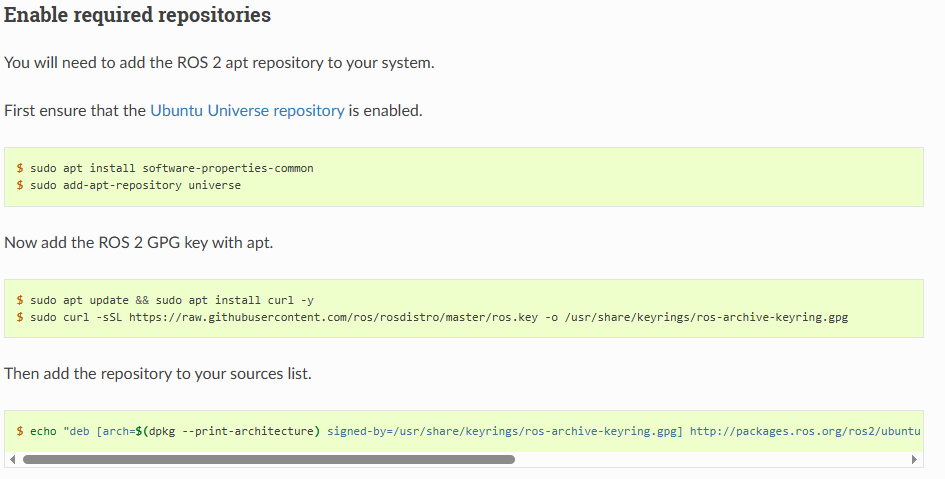
sudo apt install software-properties-common
sudo add-apt-repository universe
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo “deb [arch=$(dpkg –print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main” | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null

sudo apt update && sudo apt install ros-dev-tools
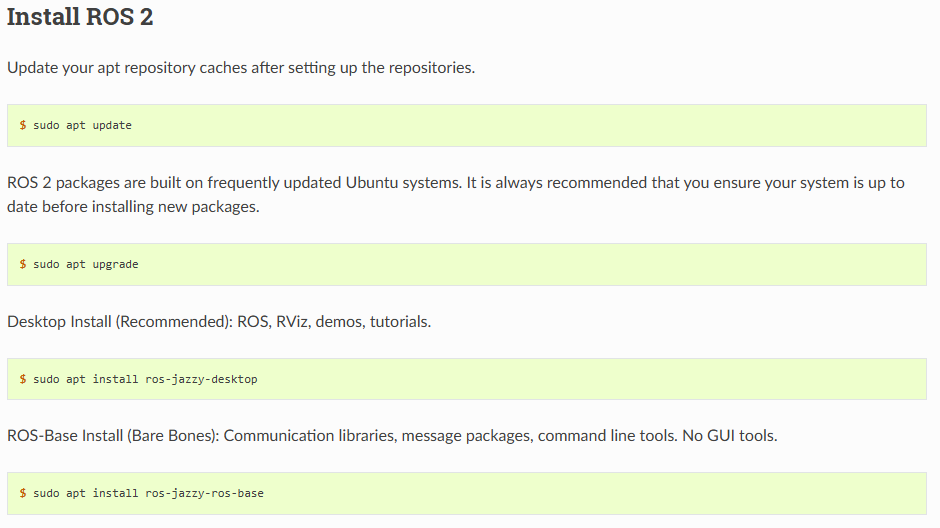
sudo apt update
sudo apt upgrade
sudo apt install ros-jazzy-desktop
** No need to install base **

source /opt/ros/jazzy/setup.bash
Test to see if ROS2 is installed correctly.

source /opt/ros/jazzy/setup.bash
ros2 run demo_nodes_cpp talker
Run in new terminal: source /opt/ros/jazzy/setup.bash
ros2 run demo_nodes_py listener